



Jobbra vagy balra?
Minden gazda találkozott már azzal a helyzettel akár a napi séta alkalmával, hogy a kutyát irányítania kell. Míg a kedvencünk pórázon van, ez a feladat nem olyan nagy kihívás, de amint lekerül a póráz, valamilyen módon mindenki igyekszik irányba küldeni a kutyáját, még ha ez a feladat nem is tudatos tanításon keresztül zajlik. A legtöbb sportkutyás viszont komoly tréninggel tanítja a kutyáját arra, hogy az általa kijelölt irányba mozduljon.
Fontos feladat ez a manapság igen népszerű K99-es vizsgarendszer ügyességi ágazatában, ahol magasabb szinteken igen precíz irányba küldésre van szükség. A szintén közkedvelt agility sportban is meghatározó, hogy a kutyát a helyes irányból tudjuk az akadályra küldeni. Ha visszanézünk az ősibb munkakutyás időkre láthatjuk, hogy ez a feladat komoly múltra tekint vissza. A terelőkutyák esetében ugyanis alapvető elvárás volt a kezdetektől fogva, hogy képesek legyenek a pásztor valamilyen jelzése alapján irányt váltani. Mivel a munkakutya általában a pásztortól távol dolgozik, a kézjelek használata nem túl hatékony, inkább a füttyhangok és más akusztikus parancsok alapján mozdul a kutya a kívánt irányba.
Ezek alapján egyértelmű, hogy a kutyák képesek a „menj balra/jobbra” parancsot megtanulni, azonban a képesség tudományos vizsgálata igencsak gyerekcipőben jár. A legkorábbi és szinte egyetlen kísérletsorozatot, ami erre a kérdésre irányult, a 60-as években egy lengyel kutatócsoport végezte. Azt vizsgálták, hogy a kutyák képesek-e a „menj balra/jobbra” parancsot megtanulni két különböző magasságú hang alapján, amelyek ugyanabból a hangszóróból hallatszódnak, illetve teljesen azonos hangok alapján, amelyek viszont két különböző helyen lévő hangszóróból szólnak. A kísérletet laborkutyákkal végezték és igyekezték „automatizálni” a jutalmazást, hogy ez emberi hatást minimálisra csökkentsék. A tréning a következő módon zajlott: a kutyát a szoba közepén hosszú pórázra kötötték, vele szemben balra és jobbra egy-egy fából készült csapóajtós dobozt helyeztek el, amelyeket drótok segítségével tudtak kinyitni és bezárni. Ezekben volt a jutalomfalat. A két hangot halló csoportokban a hangszórót a kutya fölé helyezték el, az egyhangos csoportban a két hangszórót a kutyától balra és jobbra tették. A hang lejátszása után, ha a kutya a megfelelő oldalon lévő dobozhoz ment, az ajtó egy kattanással kinyílt és a kutya megkapta a falatot. Ha jól belegondolunk, ez a tanítási módszer teljesen megfeleltethető egy manapság klikkerrel zajló tréningnek, bár ez a nagyon okos és hasznos eszköz akkoriban még ismeretlen volt.
A kísérletsorozat igen érdekes eredményekkel szolgált. A kutyák nem vagy nagyon nehezen (több mint 800 ismétlés után) voltak képesek megtanulni a „menj balra/jobbra” feladatot abban a csoportban, ahol egy helyről két különböző hang jött a hangszóróból. Sokkal sikeresebbek voltak, amikor két különböző helyről kapták ugyanazt a hangot. A kutatók ebből azt a következtetést vonták le, hogy a kutyák vagy nem képesek a két különböző hangot megkülönböztetni vagy nem tudják összekapcsolni azzal, hogy az egyiknél balra, a másiknál jobbra kell menni. Viszont képesek összekapcsolni a hang forrásának helyét a saját mozgásuk irányával.
Akinek van tapasztalata akár a saját, akár más sportkutyával igencsak meglepődhet ezen az eredményen, mivel saját szemünkkel láthatjuk, hogy a kutyák képesek akár kézjelre, akár szóbeli parancsra balra/jobbra indulni. A fent említett kísérletről el kell mondanunk, hogy összesen nyolc, laborban élő kutya vett részt benne, akik tartási körülményeiről szinte semmit nem tudunk. Ezért feltételezhetjük, hogy családban élő, normálisan szocializált kutyák esetében valószínűleg más lett volna az eredmény.
A kutya irányba küldése tehát a mindennapi élet és különböző kutyás sportok során is elengedhetetlen, ugyanakkor tudományos okokból is fontos. Az ELTE Etológia Tanszéke 2011-ben csatlakozott a SWARMIX projekthez. Négy svájci egyetem kutatócsoportjával együtt egy olyan repülő robot kifejlesztésén dolgoztunk, amely képes a mentőkutyáknak segítséget nyújtani az elveszett áldozatok felkutatásában. Ideális helyzetben a mentőcsapat a GPS-szel, kamerákkal és különböző szenzorokkal felszerelt robotokkal együtt hatékony mentési stratégiákat alkalmazhat, mivel nagy területet is gyorsan feltérképezhet. Az etológusok számára a projekt igazán kihívást jelentő része a kutya és a robot hatékony együttműködésének kialakítása jelentette. A cél az volt, hogy a robot elvezesse arra területre a kutyát, ahol a kamerái segítségével talál egy potenciális áldozatot. Mivel a kutyához és a robothoz képest az ember lassú, a kutyának gyakran egyedül kell boldogulnia. Ezért olyan rendszert kellett kifejlesztenünk, amellyel a távolban dolgozó kutyát úgy küldhetjük irányba, hogy a jeleket később a robot is használhassa. A másik feladatunk annak az eszköznek a kifejlesztése volt, amivel a távolban is jutalmazni tudjuk a kutyát.
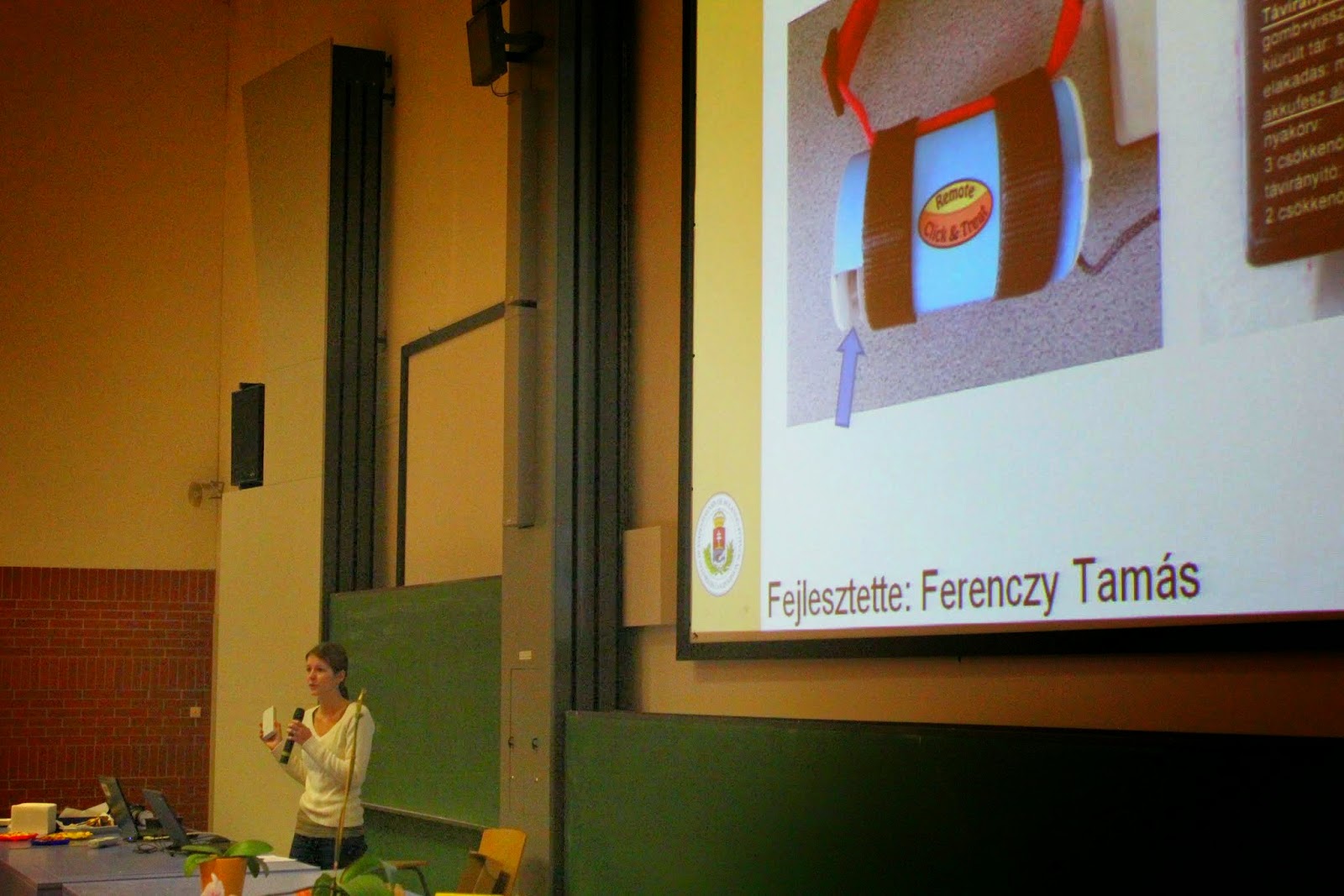
Ferenczy Tamás kiképző álmodta és valósította meg a számunkra szükséges eszközt, melyet Click & Treat nyakörvnek neveztünk el. A nyakörvre erősített szerkezet 18 jutalomfalat tárolására és 5 féle különböző hangjel leadására alkalmas. Távirányításának köszönhetően 500 m távolságig lehetővé teszi, hogy a tőlünk távol dolgozó kutya viselkedését klikk hanggal és alul kipottyanó jutalommal pozitívan megerősíthessük. Egy kísérletet is elvégeztünk, hogy lássuk, mennyire használható az eszköz irányba küldésnél. Ebben 16 felnőtt családi kutya vett részt, akiket a tesztet megelőzően már tanított gazdájuk klikker módszerrel. Első lépésként a kutyáknak meg kellett tanulnia, hogy a jutalmat ne a gazdától vagy a kísérletvezetőtől várják, hanem megszokják, hogy a nyakukban lógó szerkezetből esik ki. Ezek után indulhatott el az alaptréning, amely során a kutyával szemben balra és jobbra két ugyanolyan céltárgyat, egy-egy fekete paravánt helyeztünk el a kísérleti szobában. A nyakörvből a távirányítóval kiadtuk a jelzésként használt magas vagy alacsony frekvenciájú hangok egyikét.
A gazda a „mehetsz” paranccsal elengedte a kutyát. Ha a kutya a hangnak megfelelő oldalon lévő paravánhoz ment, kapott egy jutalmat a nyakörvből, ha a rossz oldalra ment, akkor a gazda visszahívta a kutyát és kezdődött minden elölről. Kezdetben a kutyák természetesen nem tudták, melyik oldalhoz melyik hangparancs tartozik, de rövid időn belül összekapcsolták a kettőt és átlagosan 72 próba alatt elérték a kritériumszintet, tehát tízből tízszer a megfelelő oldalon lévő tárgyhoz mentek. Azon kívül, hogy kíváncsiak voltunk, mennyi idő szükséges a kutyáknak a feladat elsajátításához, azt is szerettük volna tudni, hogy a tesztszobában történő változás hatással van-e a kutyák teljesítményére. Ezért az alaptréninget teljesítő kutyák egy speciális tréninggel folytatták a vizsgálatot, ahol a kutyák felénél elvettük a két céltárgyat, másik felénél pedig 180°-al elforgattuk a céltárgyak és a kutya pozícióját. Korábbi vizsgálatok eredményei alapján arra számítottunk, hogy ezek a változások csökkentik a kutyák teljesítményét. Feltételezésünk beigazolódott, a kutyák teljesítménye lecsökkent az új helyzetben, de nagyon gyorsan, átlagosan 16 próba után visszaállt 100%-ra.
Ezek után következtek a tesztpróbák a szabadban, hogy kiderüljön, képesek-e általánosítani a kutyák a tanult hangparancsokat. Különböző távolságban tőlük balra és jobbra lévő fákhoz, labdákhoz vagy emberekhez kellett odamenniük. Eredményeink szerint a kutyák minden helyzetben 80% felett teljesítettek, tehát képesek voltak a tanult hangokat új helyzetekben is használni. Érdekes módon, ha a két céltárgy és a kutya által bezárt szög hegyesebb volt, mint a tréning során használt szög, a kutyák rosszabbul teljesítettek. Ezen kívül azonban sem a céltárgyak, sem azok távolsága nem befolyásolta a kutyák sikerességét. Ha otthon tanítjuk a kutyát hasonló feladatra (pl. több bója közül egy bizonyoshoz akarjuk odaküldeni a kutyát) érdemes tehát olyan szögben kitett tárgyakkal gyakorolni, melyet később is (pl. vizsgán) használni szeretnénk.
A kísérlet legfőbb tanulsága az, hogy a kutyák képesek rövid idő alatt megtanulni a „menj balra/jobbra” parancsot, és hatékonyan használni azt új helyzetekben is. Az általunk kifejlesztett távirányításos nyakörv pedig a gazdák szerint is hatékonyan segíthet a feladat tanításában, és minden olyan helyzetben ahol a kutyának a gazdától távolodnia kell. Ezt a saját bőrömön is tapasztaltam, amikor hátrálni tanítottam a kutyámat a szokásos klikkeres módszerrel. Pár méter után ugyanis a kutya mindig megállt, és elindult vissza hozzám, várva a jutalmat. Amint megszokta, hogy ha rajta van a nyakörv, akkor nem a kezemből jön a falat, pár alkalom után sikerült elérnem, hogy 50 métert menjen hátra. A nagy sikerre való tekintettel és némi fejlesztés után tervezzük, hogy szabadalmaztatjuk a nyakörvet, és igény szerint megrendelhető lesz.
Dr. Gergely Anna, az MTA Összehasonlító Viselkedéskutató Csoport munkatársának vendégposztja a kutyakutatás.blogspot.hu oldalán jelent meg.
(kutyabarát.hu)
